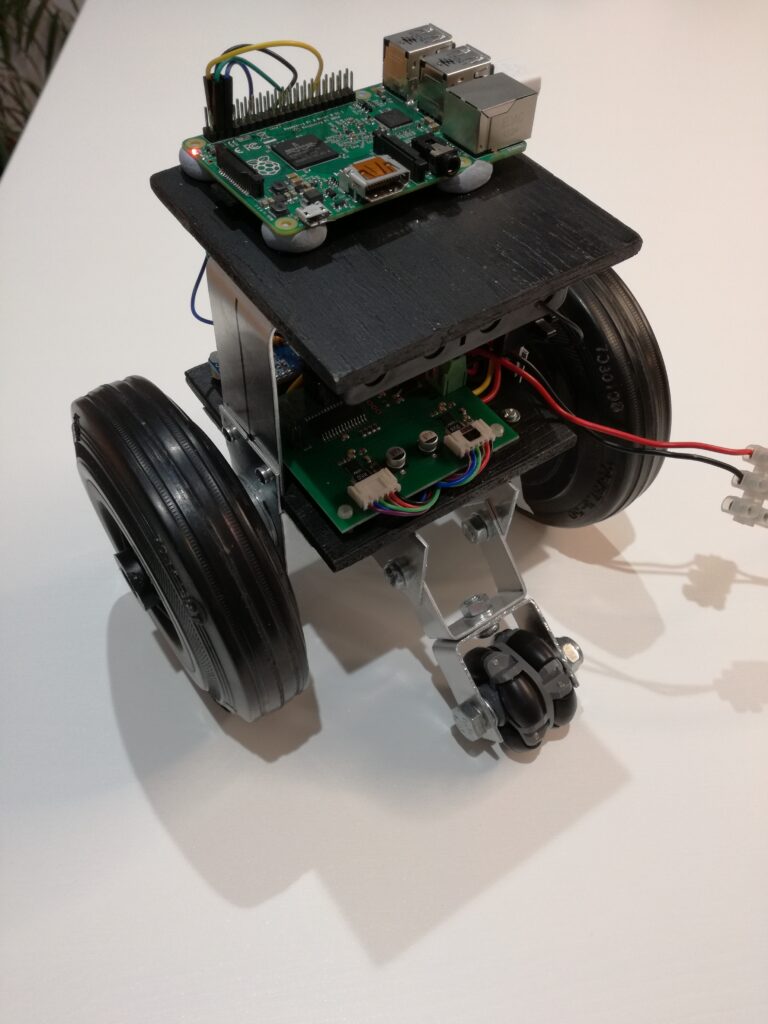
For PiWars 2019, we decided to build a 2-wheeled self balancing robot.
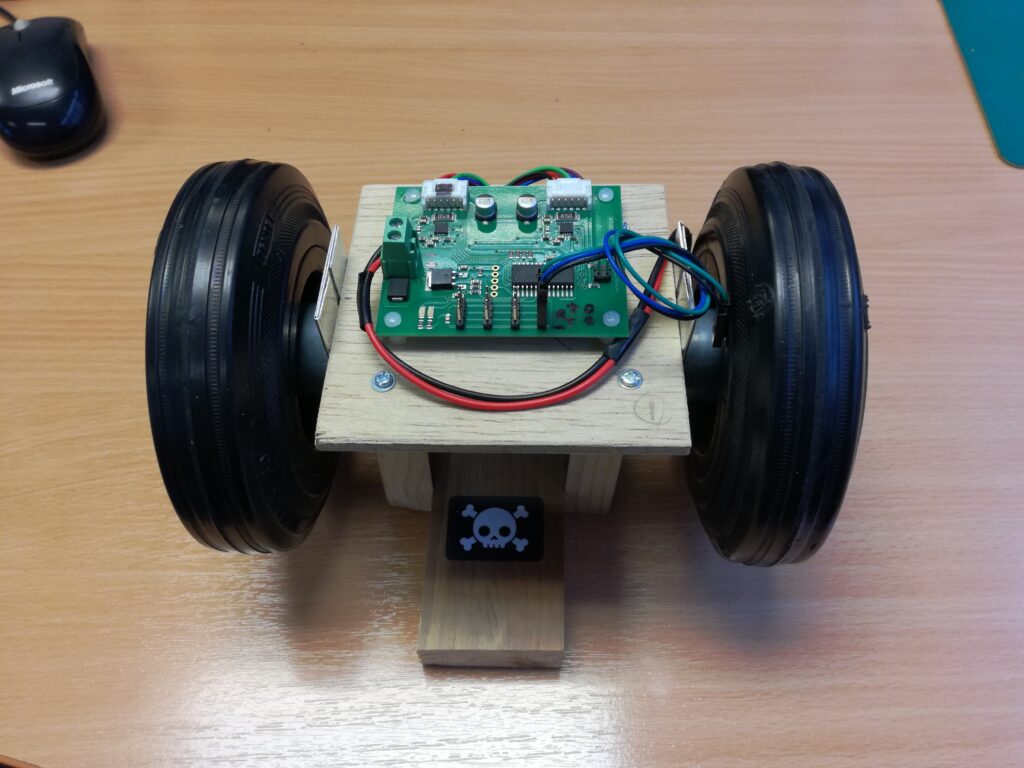
We started by constructing a prototype using various parts from last year’s robot (wheels, motors and motor controller), mounted on some bits of wood so we could figure out the overall shape:

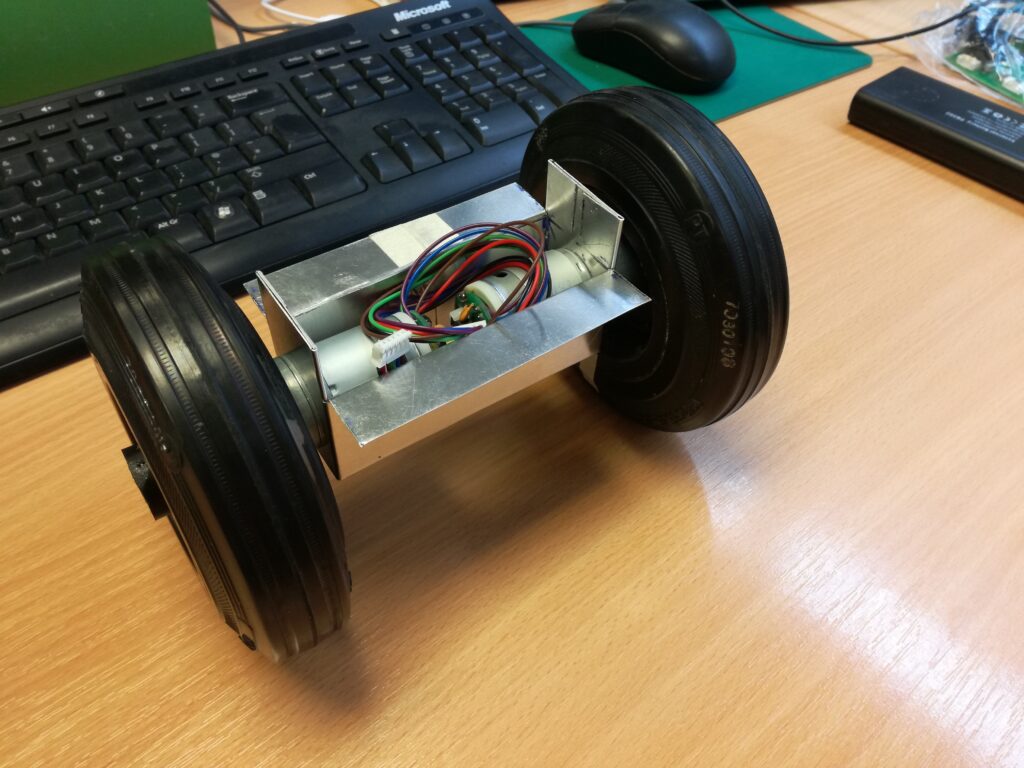
We wanted to use larger wheels, however, we also had to keep the robot within the size limit for the competition, which proved to be a problem. The wheels I wanted to use were these from B&Q, but mounting these onto the prototype robot above resulted in a robot which was too wide. The solution I came up with was to remove part of the inner section of the wheel hub, allowing the motor and gearbox to embed into it a good way, as shown here:



I came up with a rough design for the robot using SketchUp, based on these new wheels:
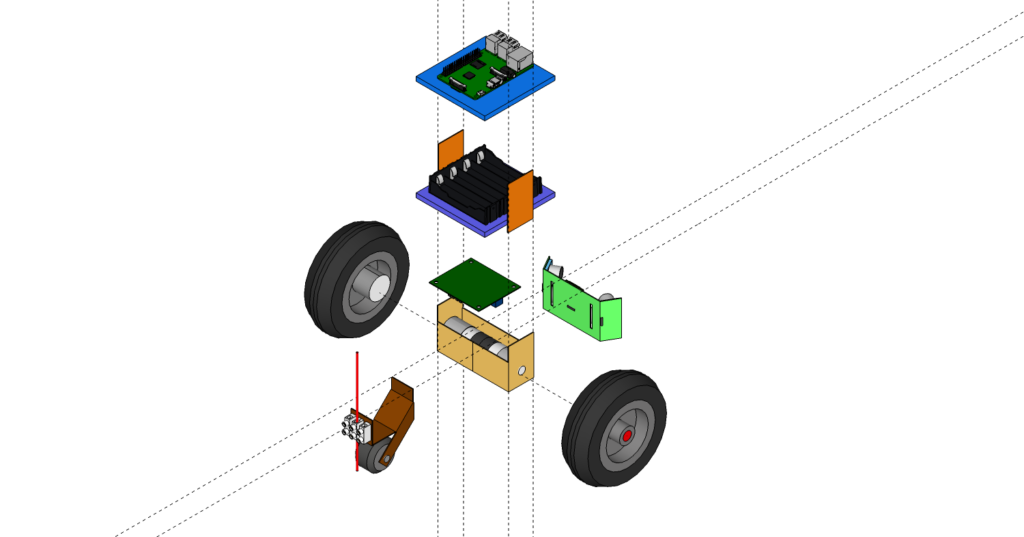
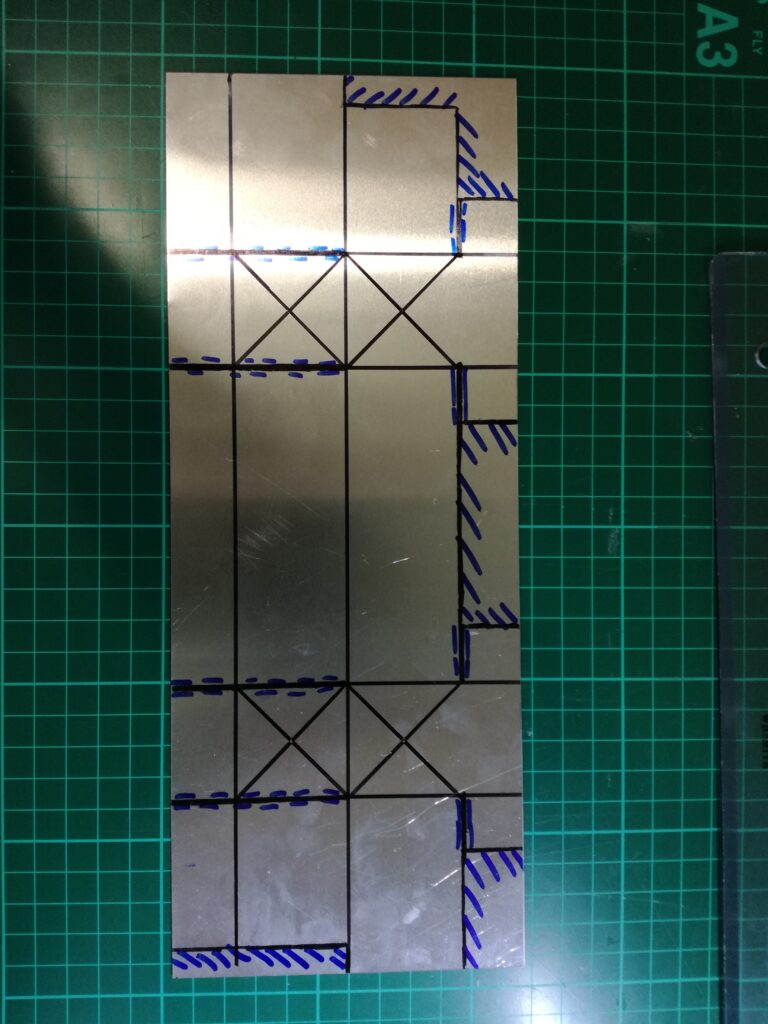
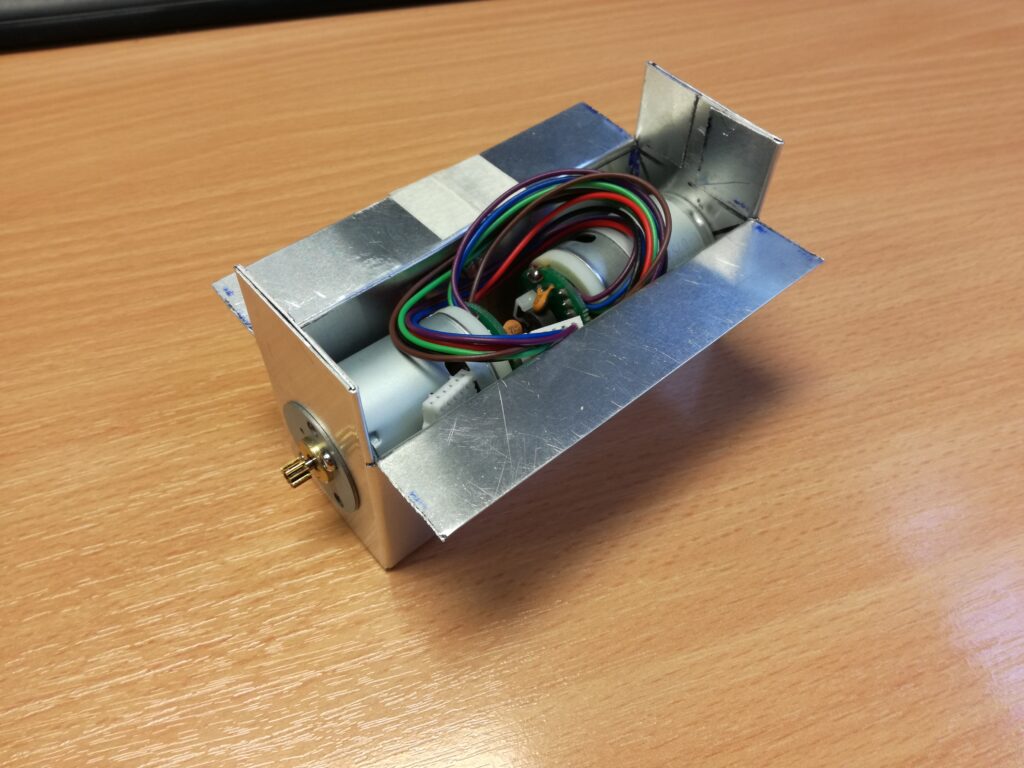
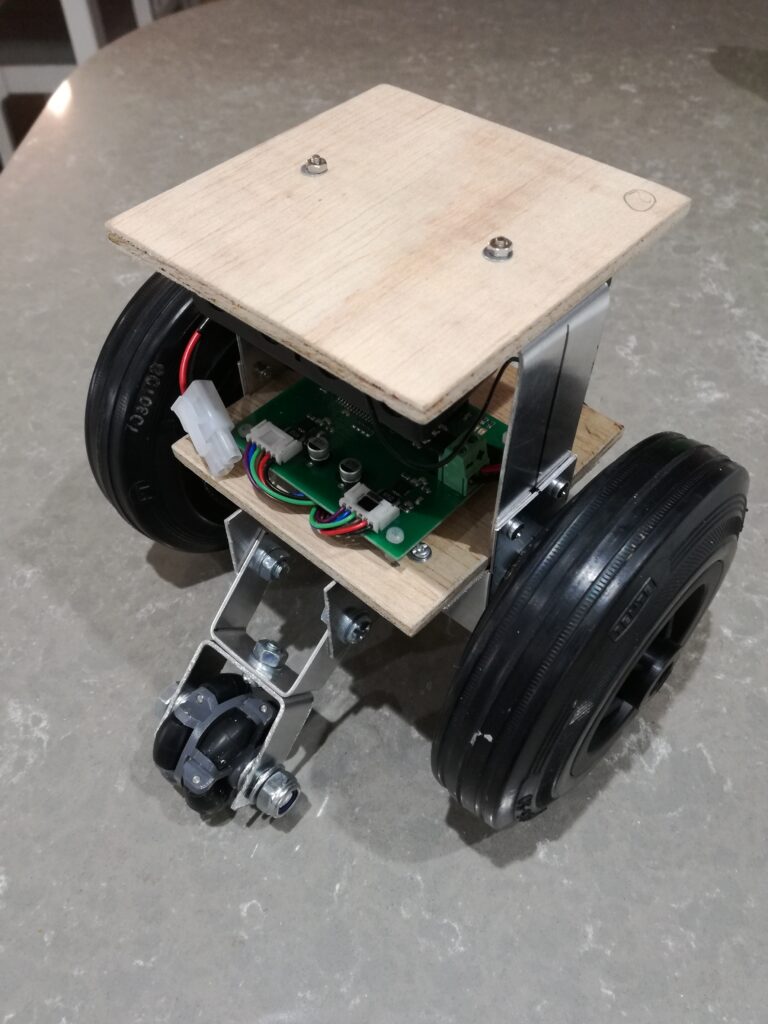
The chassis to hold the motors would be constructed from folded aluminium sheet:
Then a bit of wood on top to mount the motor controller. I also added a third wheel (an omni-wheel), to keep it upright during development:
Adding another bit of wood to mount the Pi and batteries (4x 18650), and a coat of black paint, it doesn’t look too bad: