Remote camera robot
A robot that can be controlled remotely using a real-time video feed. The goal of this project was to be able to control a robot… Read More »Remote camera robot
A robot that can be controlled remotely using a real-time video feed. The goal of this project was to be able to control a robot… Read More »Remote camera robot

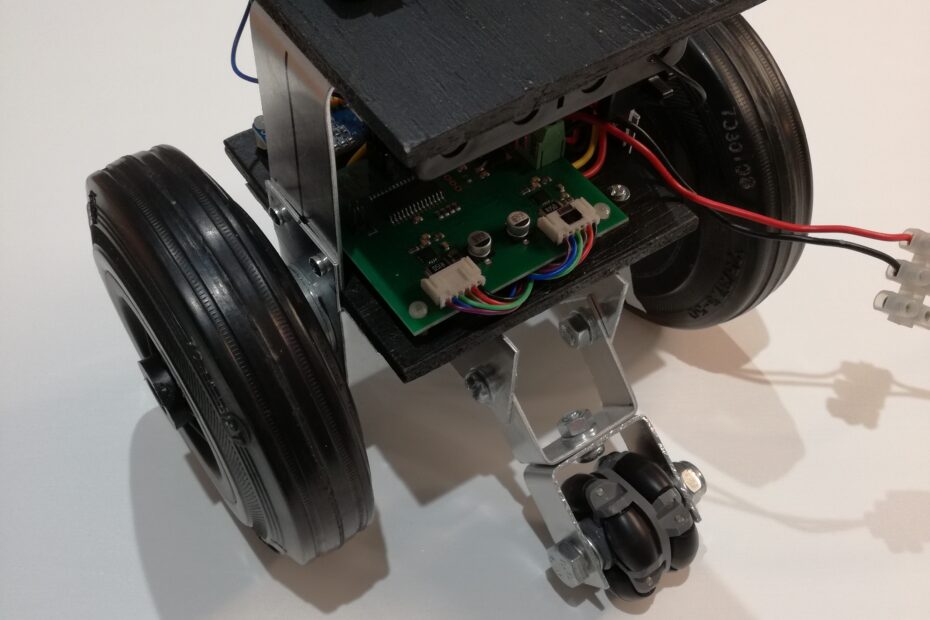
The robot was powered by 4x 18650 Lithium Ion batteries. These were connected in series to give 14.8V, which was connected directly to the motor… Read More »Antigravity robot – part 2
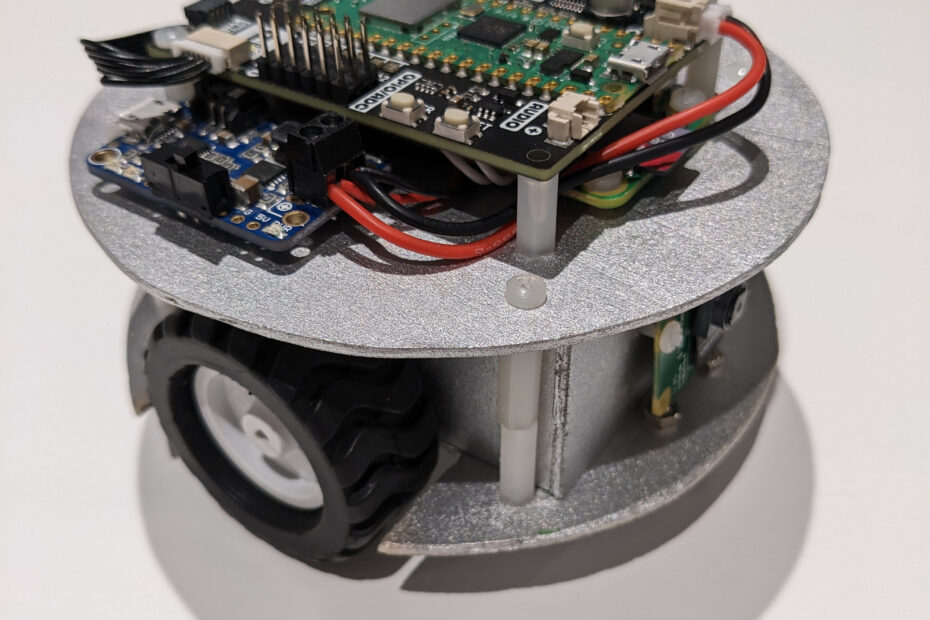
For PiWars 2019, we decided to build a 2-wheeled self balancing robot. We started by constructing a prototype using various parts from last year’s robot… Read More »Antigravity robot – part 1
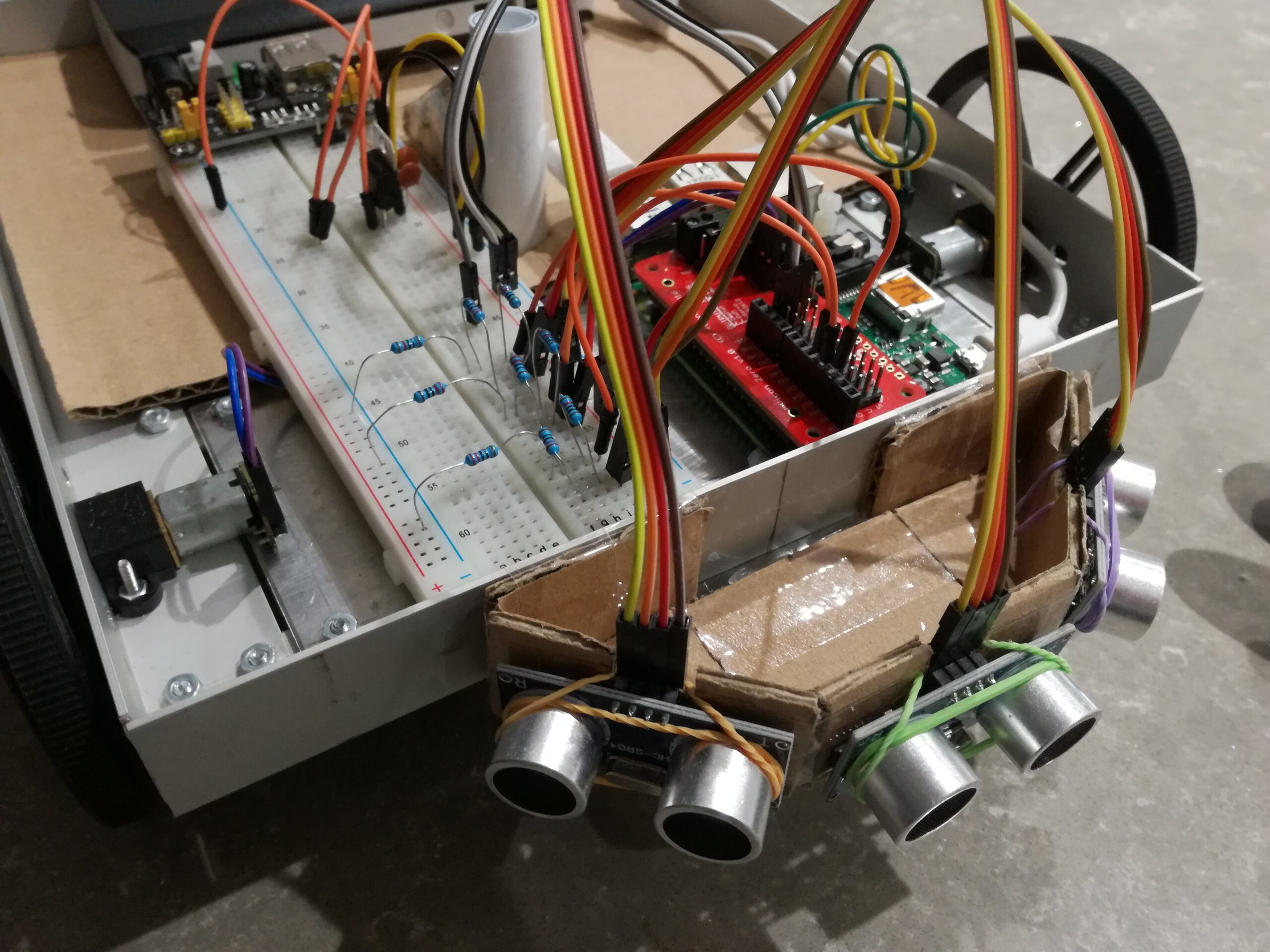
In preparation for PiWars, I wanted to try out using ultrasonic distance sensors to avoid obstacles and find a free path. I rigged up three… Read More »Obstacle avoidance
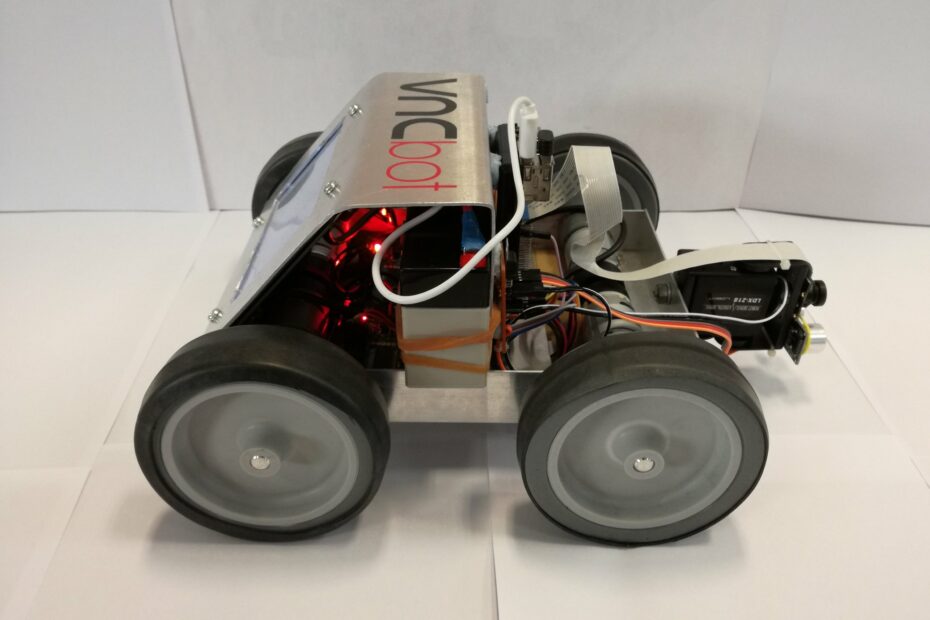
As part of a team from work, I made a robot to compete in the PiWars 2018 competition. We started with a set of 4… Read More »VNCbot
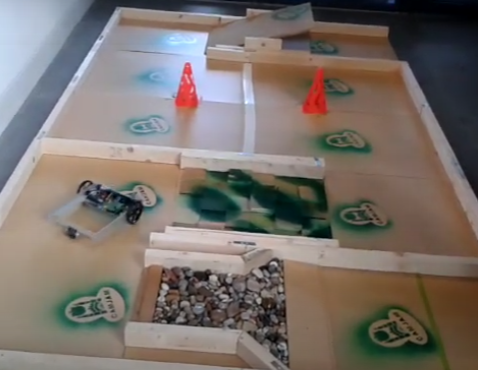
So, I finally got around to making my robot move, and allow the motor speeds to be controlled from a Raspberry Pi via I2C. What better way… Read More »Robot obstacle course
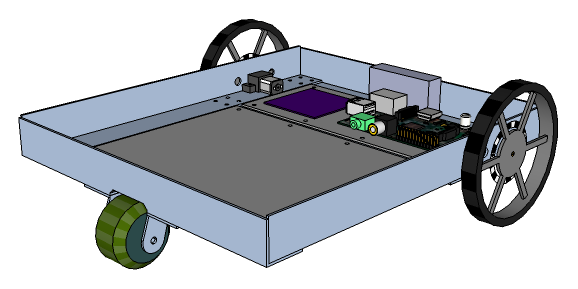
I’ve decided to make a robot! I think its something everyone should do at some point, but to be honest, its never particularly appealed to… Read More »Making a robot