As part of a team from work, I made a robot to compete in the PiWars 2018 competition.
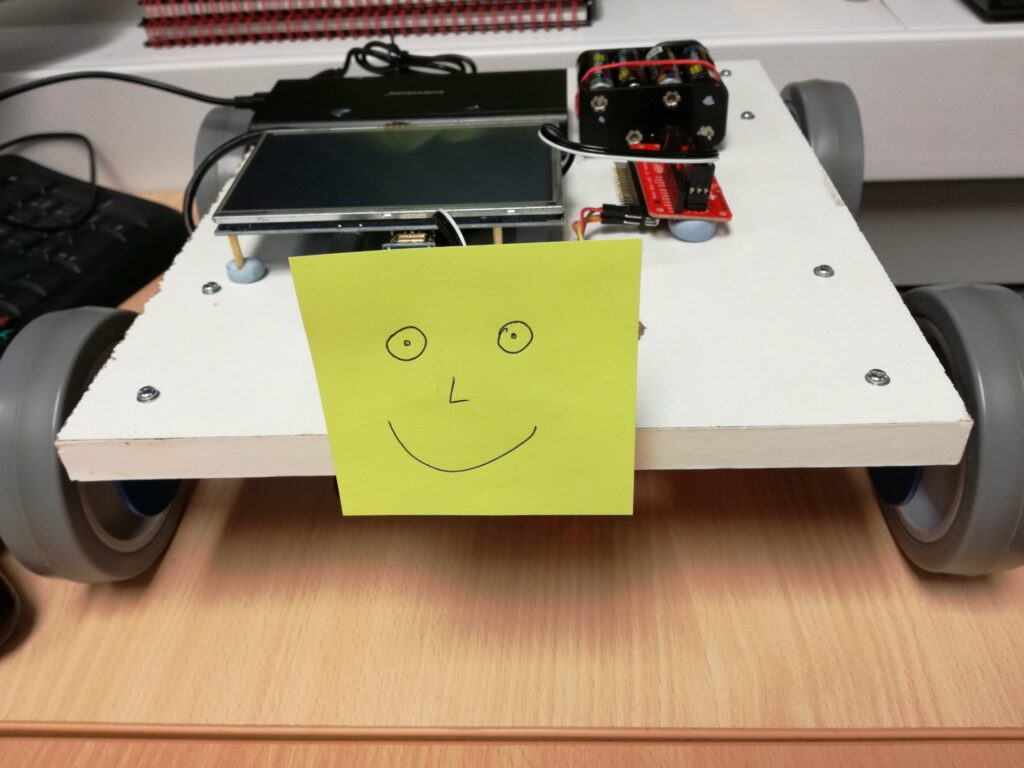
We started with a set of 4 motors, wheels and motor controller boards, which we mounted on a piece of wood along with a Raspberry Pi, batteries and a small HDMI screen to form a prototype.
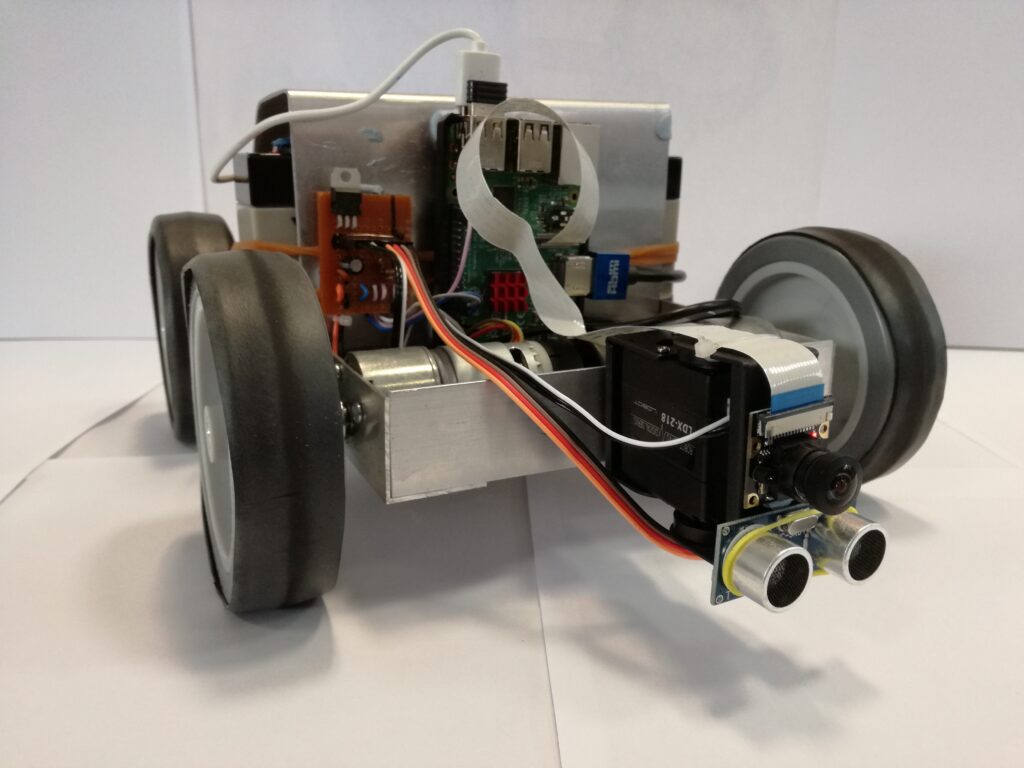
We cut some pieces of aluminium angle to form a chassis just wide enough to accommodate the motors, drilling holes to mount these. We found that the AA batteries we were using were not able to supply enough current for the motors. After weighing up the options, we decided to use a small (ish) lead-acid battery.

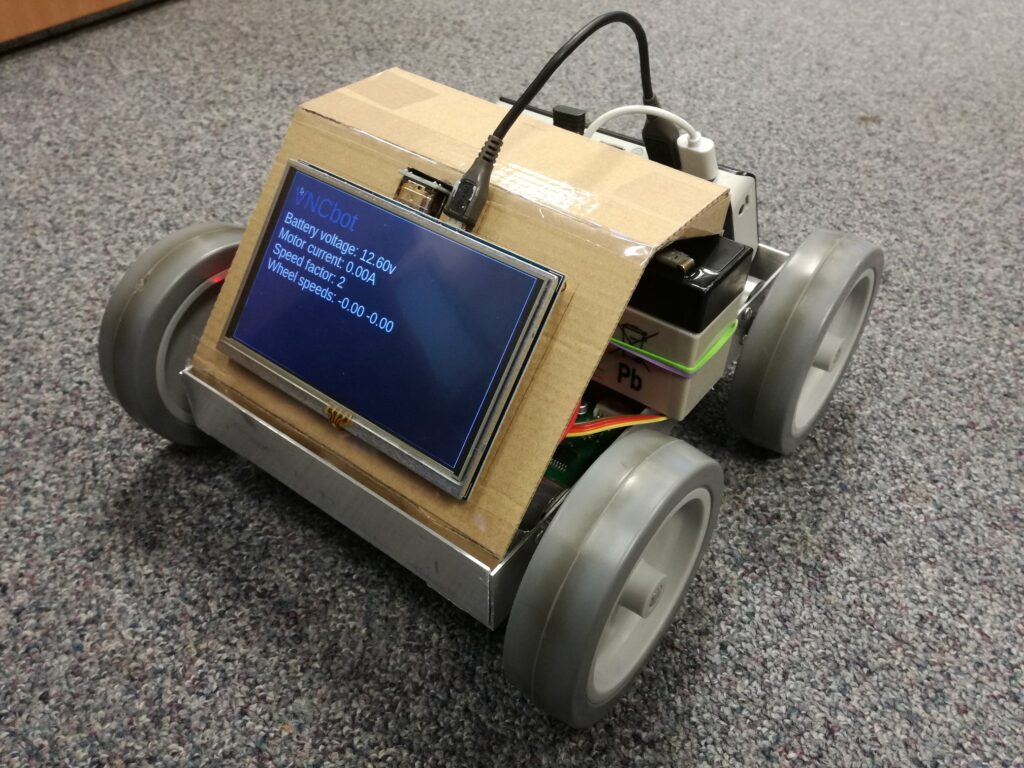
In order to safely mount the battery and screen, we designed a cover to fit on top, using a cardboard prototype initially.

I attached an inline fuse and connector to the battery for safety, and to allow us to remove it for recharging more easily.

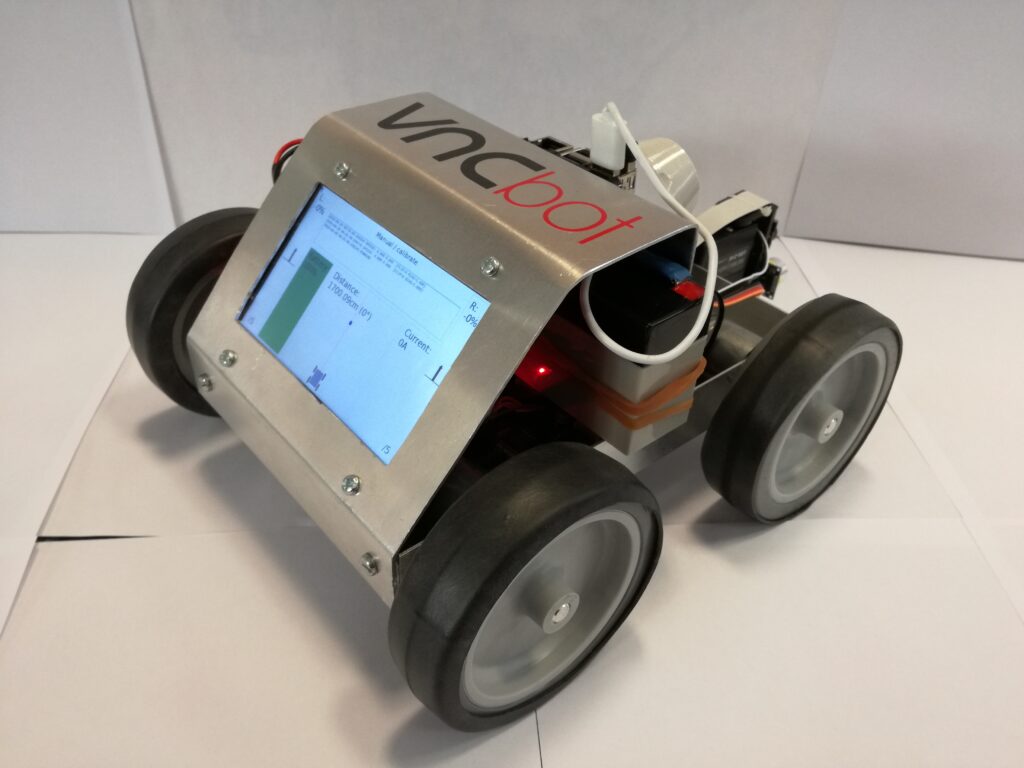
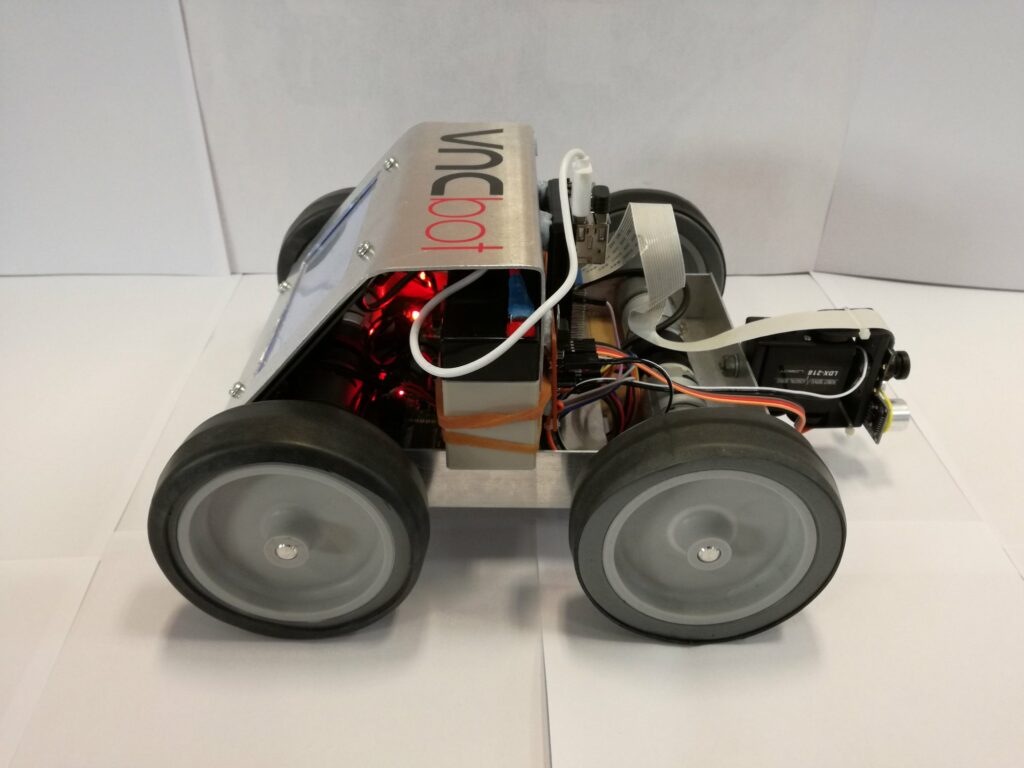
We made the finished cover from aluminium sheet, and added some branding (thanks to the Marketing dept). We also added a camera and distance sensor onto the rear, attached via a servo so we can pan these left and right.


We made some improvements to the software, including a graphical display using Python and Tkinter to show what was going on.

And with that, we were ready to compete in the competition.
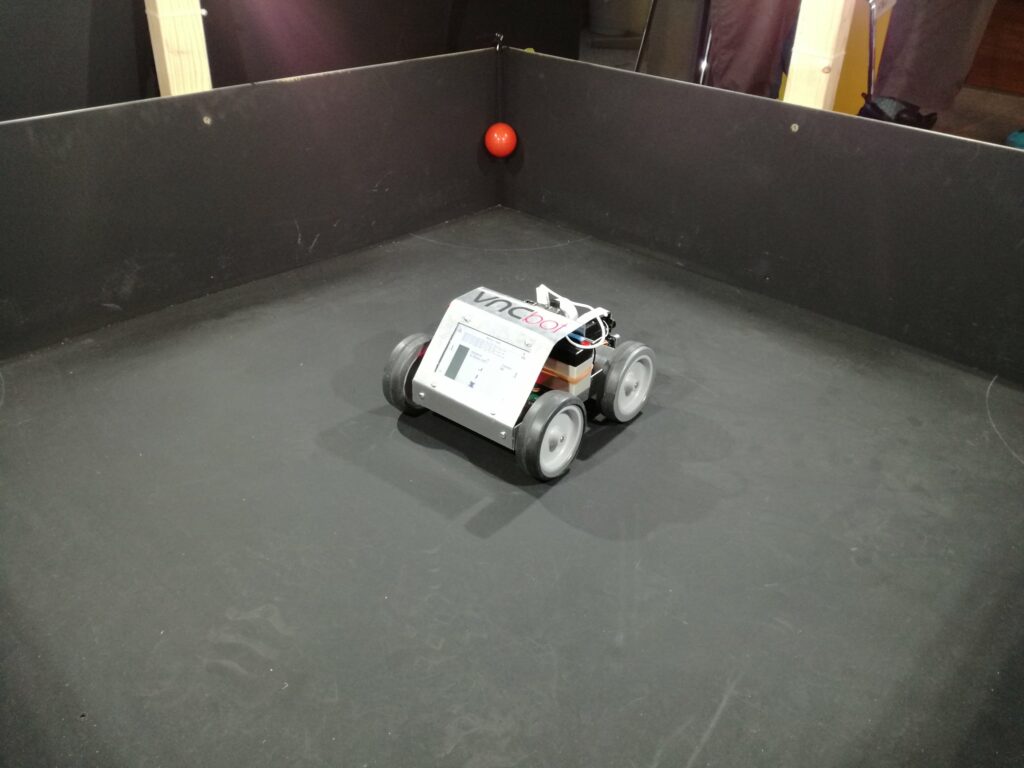
Alas, we didn’t do very well, apart from here: