Remote camera robot
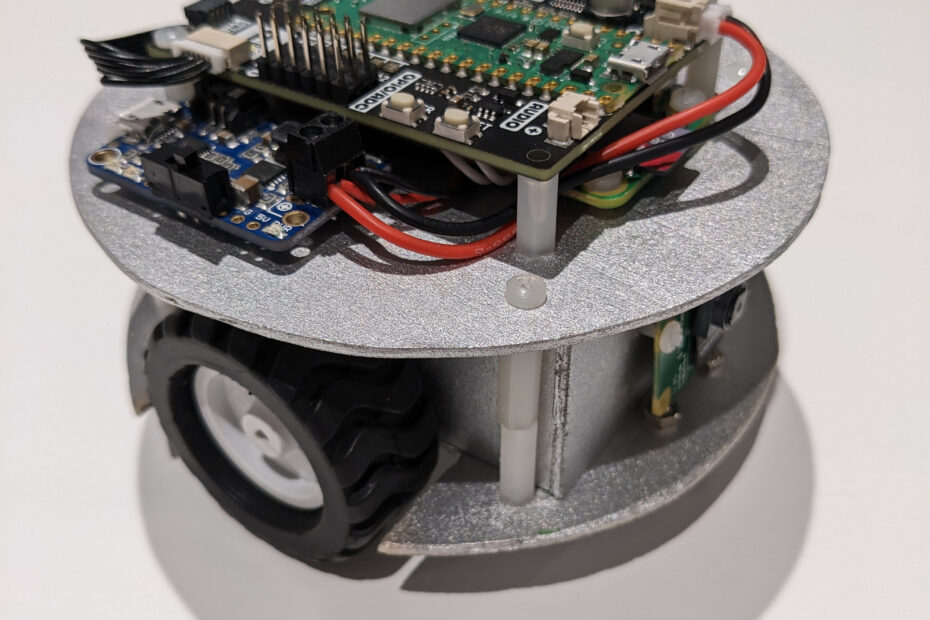
A robot that can be controlled remotely using a real-time video feed. The goal of this project was to be able to control a robot… Read More »Remote camera robot
A robot that can be controlled remotely using a real-time video feed. The goal of this project was to be able to control a robot… Read More »Remote camera robot
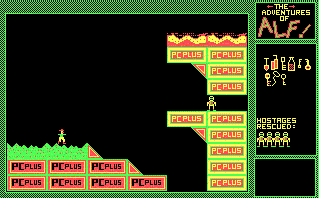
I wrote this back in 1993, one of my first complete working programs. Its a DOS platform game which I wrote and sent to PC-Plus… Read More »The Adventures of Alf

I spooked-up a Halloween decoration using a bit of electronics. I started off with a “hanging reaper” decoration from Wilko, which I wanted to hang… Read More »Spooky Halloween thing

The robot was powered by 4x 18650 Lithium Ion batteries. These were connected in series to give 14.8V, which was connected directly to the motor… Read More »Antigravity robot – part 2
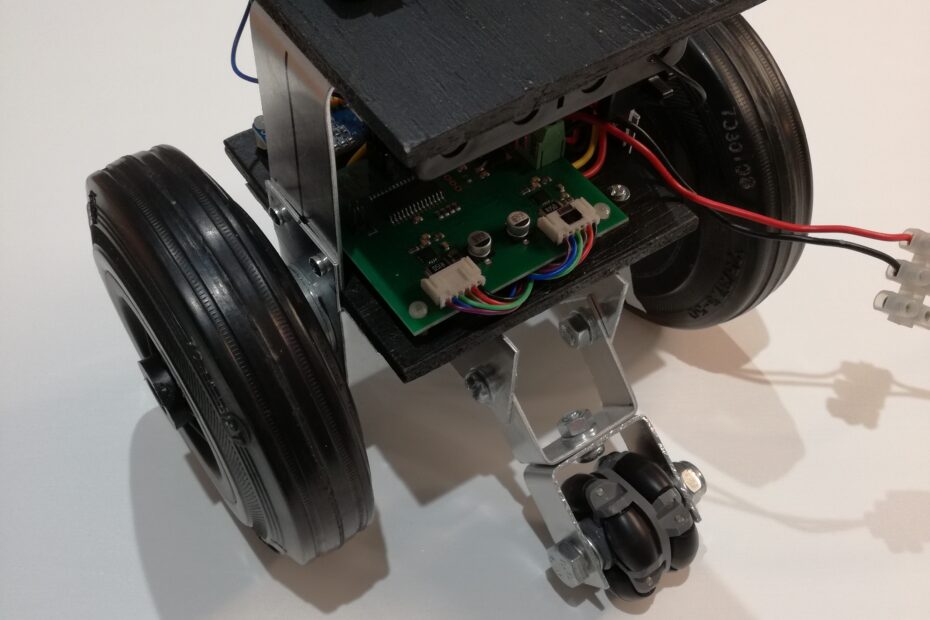
For PiWars 2019, we decided to build a 2-wheeled self balancing robot. We started by constructing a prototype using various parts from last year’s robot… Read More »Antigravity robot – part 1
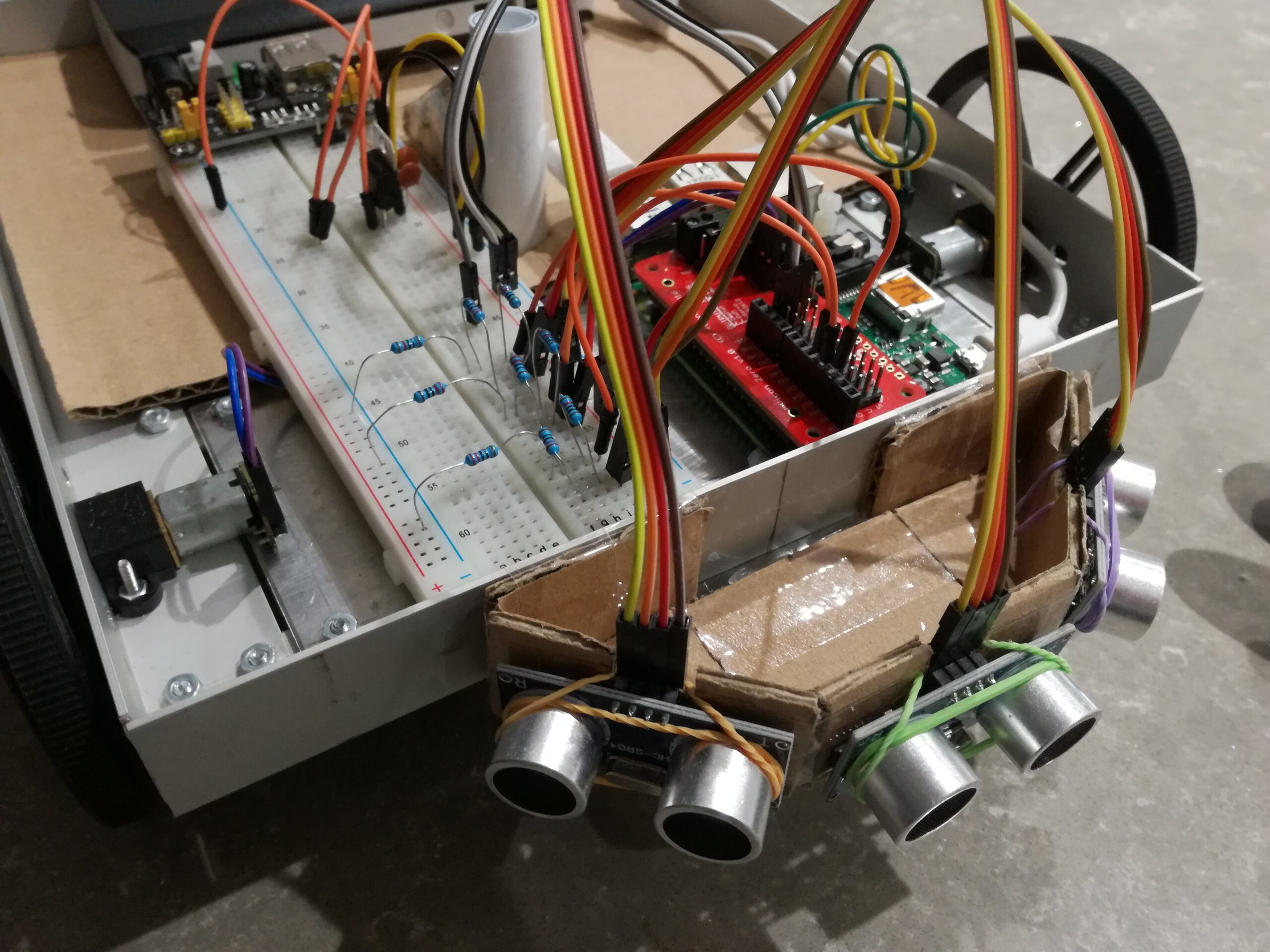
In preparation for PiWars, I wanted to try out using ultrasonic distance sensors to avoid obstacles and find a free path. I rigged up three… Read More »Obstacle avoidance
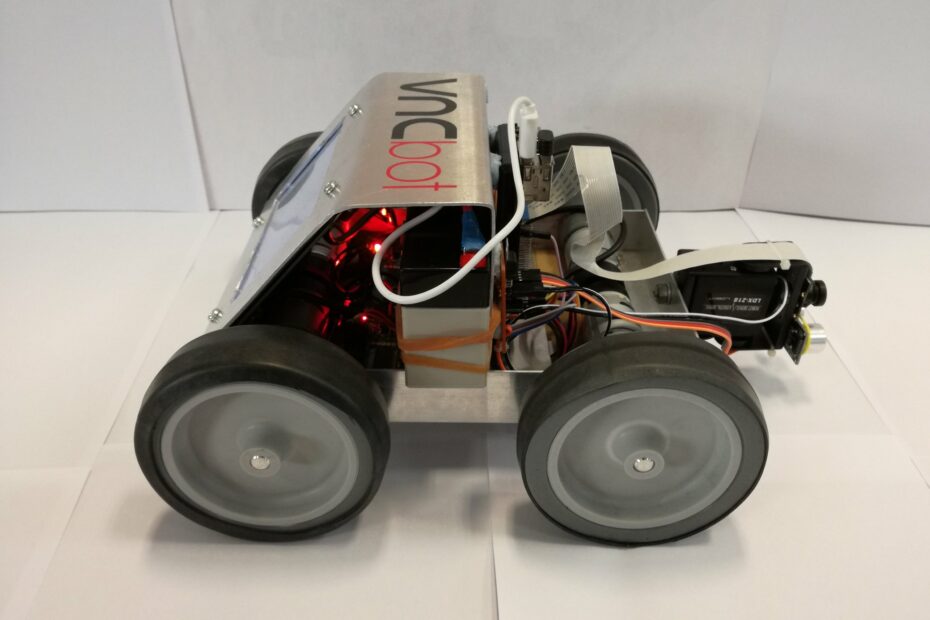
As part of a team from work, I made a robot to compete in the PiWars 2018 competition. We started with a set of 4… Read More »VNCbot

A quick hack to make a night light which can display a spectacular rainbow light show using a Raspberry Pi Zero W. Ideal for children… Read More »Raspberry Pi Night Light

A Mandelbrot fractal calculated in JavaScript and drawn on an HTML5 canvas: This complex fractal pattern is based on the simple iteration: Z = Z2 +… Read More »Mandelbrot in HTML5
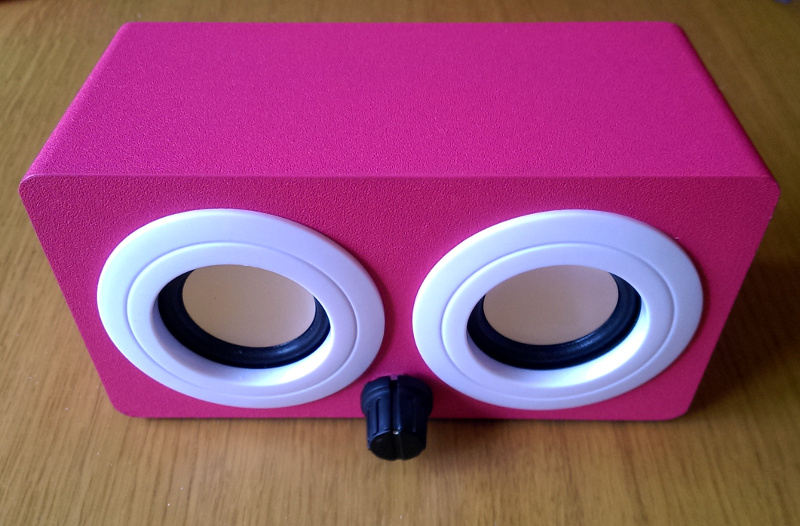
In this project, I describe how I transformed an inexpensive amplified speaker unit into a network-connected music player by embedding a Raspberry Pi Zero. Components… Read More »Pi Music Box